


伺服電機主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移,因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了呼應,或者叫閉環,如此一來,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位,可以達到0.001mm。伺服電機在要求精密控制的工業自動化設備中得到了廣泛的應用,他的閉環控制功能,是步進電機無法比擬的。在一些場合,由于步進電機沒有反饋,因此當步進電機卡死或打滑會出現丟步的情況,從而大大影響設備使用精度,因此步進電機一般用于純粹的轉動過程,或者用于對精度要求不高的使用場合。伺服電機是如何實現精準定位?如何理解它的閉環特性?今天我們就來說說。首選我們看下交流伺服系列的組成。由伺服驅動器和伺服電機組成。這里我們主要講述伺服驅動的工作原理,電機只是一個執行機構。驅動器的結構簡圖如下,和變頻器的主電路類似,電源經過整流,逆變,實現從AC-DC-AC的轉換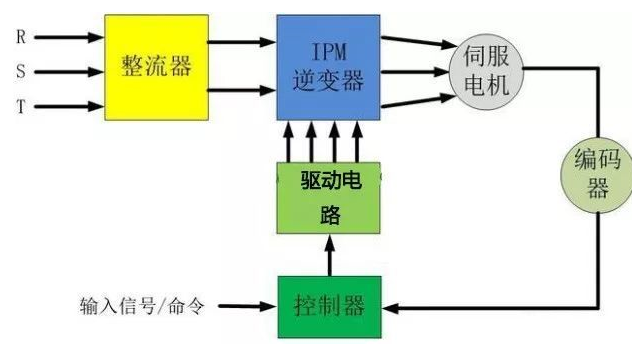 伺服驅動器結構簡圖輸入信號/命令可以是位置、速度、扭矩等控制信號,對應伺服電機的三種控制模式,每種控制模式都對應著環的控制,扭矩控制是電流閉環控制,速度模式是速度閉環控制,位置模式則是三閉環控制模式(扭矩、速度、位置)。下面我們對位置模式的三閉環進行分析:
伺服驅動器結構簡圖輸入信號/命令可以是位置、速度、扭矩等控制信號,對應伺服電機的三種控制模式,每種控制模式都對應著環的控制,扭矩控制是電流閉環控制,速度模式是速度閉環控制,位置模式則是三閉環控制模式(扭矩、速度、位置)。下面我們對位置模式的三閉環進行分析: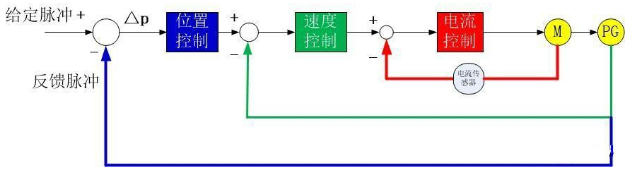 位置模式的三閉環控制上圖中M表示伺服電機,PG代表編碼器,最外面的藍色的代表位置環,因為我們最終控制的是位置(定位),內環分別是速度環和電流環(扭矩環),位置模式下速度環和電流環作為保護環防止失速控制和過載以確保電機恒速運轉和電機電流恒定。我們重點看下位置環是如何確保電機能夠準確旋轉給定的角度。假如我們給定脈沖為1個,此時反饋脈沖為,脈沖偏差△p=1,輸入到控制器中,這時候驅動電路控制IPM逆變器產生SPWM波驅動伺服電機旋轉,注意這個SPWM波和我們發脈沖的方波是不一樣的,時電機帶動編碼器旋轉發出反饋脈沖,這個時候△p=0,電機停止輸出,1個脈沖定位完成。整個從發出脈沖到接受反饋脈沖的過程就是一個閉環過程,從而確保電機能夠準確定位,脈沖的數量決定定位的距離,脈沖的頻率決定電機的轉速。聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
位置模式的三閉環控制上圖中M表示伺服電機,PG代表編碼器,最外面的藍色的代表位置環,因為我們最終控制的是位置(定位),內環分別是速度環和電流環(扭矩環),位置模式下速度環和電流環作為保護環防止失速控制和過載以確保電機恒速運轉和電機電流恒定。我們重點看下位置環是如何確保電機能夠準確旋轉給定的角度。假如我們給定脈沖為1個,此時反饋脈沖為,脈沖偏差△p=1,輸入到控制器中,這時候驅動電路控制IPM逆變器產生SPWM波驅動伺服電機旋轉,注意這個SPWM波和我們發脈沖的方波是不一樣的,時電機帶動編碼器旋轉發出反饋脈沖,這個時候△p=0,電機停止輸出,1個脈沖定位完成。整個從發出脈沖到接受反饋脈沖的過程就是一個閉環過程,從而確保電機能夠準確定位,脈沖的數量決定定位的距離,脈沖的頻率決定電機的轉速。聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
