


從結構上講,伺服系統分為三部分:伺服電機、編碼器、驅動器。伺服電機的精度取決于編碼器,故障也常見于這三方面。由于技術、利益等關系,各廠家所生產的配件不可代替,而進口配件的渠道不很暢通,造成維修上很大困難。我們可以通過對其測量,分析研究工作原理,嘗試采用替換的方法進行維修。例如,手頭上有一個15芯電纜的編碼器,嘗試替代日本安川9芯電纜的編碼器,該編碼器分辨率為1024,6極,配套在安川公司生產的型號為SGMP-06AFTF22的交流伺服電機上,其原理如圖1所示。即編碼器的接線除?a正、a負、b正、b負、z正、z負,加上正負電源和屏蔽共9根線。而手頭上的15根線編碼器與電機裝配的9根線編碼器無法替代使用,可作如下嘗試。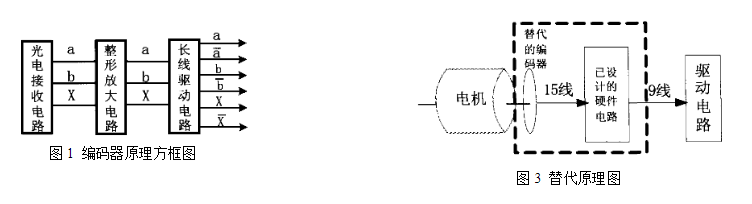 首先,對一臺同型號且完好的伺服電機裝配的9根線編碼器進行測量,得到如圖2所示波形。分析得知,a、b信號的波形與15線編碼器a、b信號的波形相同,而X信號為圖3所示。從中可看出,當U、V、W分別換相時,X的波形就發生一次變化。在一個角度的過程中共有6種波形,分別定義為Ⅰ區、Ⅱ區、Ⅲ區、Ⅳ區、Ⅴ區、Ⅵ區,依測繪結果推測,此編碼器送出的a、b、X信號,在伺服電機驅動器中可以將其解碼后得到U、V、W信號。據此,用一個常用1024線6極交流伺服電機編碼器,只要設計合理的電路,用其u、v、w以其a、b信號合成完全相同的X信號,就可以完全代替原9芯線編碼器。為便于理解,如圖3為替代原理圖,其中虛線部分即為被替代的編碼器。
首先,對一臺同型號且完好的伺服電機裝配的9根線編碼器進行測量,得到如圖2所示波形。分析得知,a、b信號的波形與15線編碼器a、b信號的波形相同,而X信號為圖3所示。從中可看出,當U、V、W分別換相時,X的波形就發生一次變化。在一個角度的過程中共有6種波形,分別定義為Ⅰ區、Ⅱ區、Ⅲ區、Ⅳ區、Ⅴ區、Ⅵ區,依測繪結果推測,此編碼器送出的a、b、X信號,在伺服電機驅動器中可以將其解碼后得到U、V、W信號。據此,用一個常用1024線6極交流伺服電機編碼器,只要設計合理的電路,用其u、v、w以其a、b信號合成完全相同的X信號,就可以完全代替原9芯線編碼器。為便于理解,如圖3為替代原理圖,其中虛線部分即為被替代的編碼器。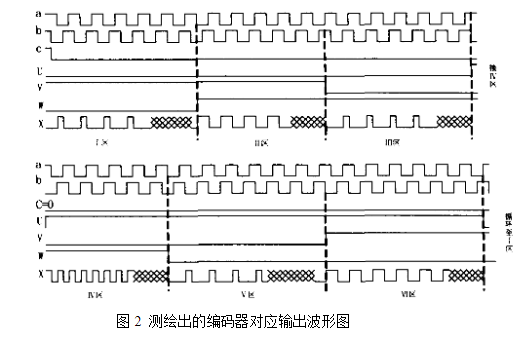 其次,依據測繪及原理分析,設計電路。方法是寫出圖2中每一區間所對應的表達式,如表1所示;按數字電路的設計思想,設計如圖4所示的邏輯電路。
其次,依據測繪及原理分析,設計電路。方法是寫出圖2中每一區間所對應的表達式,如表1所示;按數字電路的設計思想,設計如圖4所示的邏輯電路。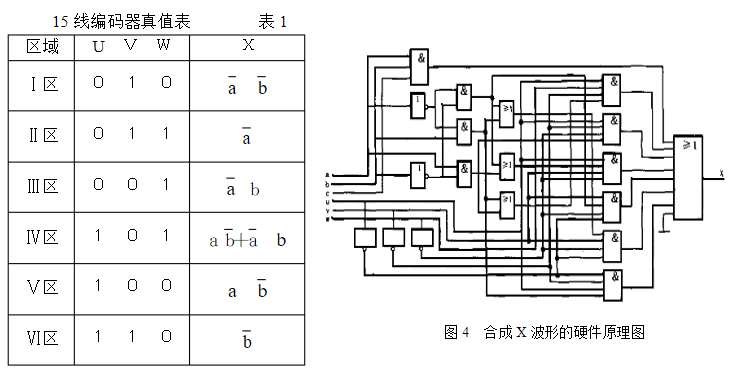 而對于于合成信號中的零點信號,讓a、b、c同時高電平時作為零信號。?根據以上真值表,可以寫出X的表達式為:
而對于于合成信號中的零點信號,讓a、b、c同時高電平時作為零信號。?根據以上真值表,可以寫出X的表達式為: 然后,根據以上分析推理,繪出如圖4硬件電路原理圖對應的PCB板,并利用Protel仿真得到預期波形。? 結論:采用上述設計的電路,用15線編碼器替代9線編碼器,根據仿真結果,完全可以正常工作。利用這種方法,已成功維修好多臺進口伺服電機,解決了進口設備維修難的問題 聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
然后,根據以上分析推理,繪出如圖4硬件電路原理圖對應的PCB板,并利用Protel仿真得到預期波形。? 結論:采用上述設計的電路,用15線編碼器替代9線編碼器,根據仿真結果,完全可以正常工作。利用這種方法,已成功維修好多臺進口伺服電機,解決了進口設備維修難的問題 聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
