


伺服電機屬于控制電機,它分為直流伺服電機和交流伺服電機兩種。由于交流伺服電機具有體積小,重量輕,大轉矩輸出,低慣量和良好的控制性能等優點,已廣泛應用于自動控制系統和自動檢測系統中作為執行元件,將控制電信號轉換為轉軸的機械轉動。由于伺服電機的定位精度相當高,現代位置控制系統已越來越多地采用以交流伺服電機為主要部件的位置控制系統。這里的設計也正是通過控制繼電器的閉合、斷開,而達到控制脈寬大小的目的,通過閉環控制非標準交流伺服電機的滑動磁塊的位移,利用磁場變化達到控制電機轉速的目的。1 交流伺服電機控制系統設計方案系統使用的交流伺服電機為三相交流電機;驅動器控制U/V/W三相電形成電磁場;轉子在此磁場的作用下轉動,同時電機由接近傳感器將轉速信號反饋給驅動器;驅動器根據反饋值與目標值進行比較,調整轉子轉動的角度。伺服電動機又稱執行電動機,在自動控制系統中,用作執行元件,把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。2 系統硬件設計本項目實質上采用STC89C52RC單片機構建一個最小系統,實現脈寬可調輸出控制兩個繼電器,實現電機正反轉智能控制,從而實現伺服電機的精確位移控制。控制系統組成如圖1所示。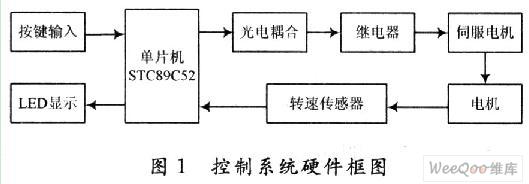 通過按鍵輸入電機所需的轉速值并與轉速傳感器反饋回來的電機轉速相比較,采用PID算法,經單片機處理后,轉化成相應的脈沖信號,再經光電耦合器調節繼電器的開度,通過調節繼電器的脈沖寬度,達到脈寬的調制,從而控制伺服電機上的磁塊正負位移,使電機達到給定的轉速值,同時單片機接受固定在伺服電機轉軸上的轉速傳感器隨著電機轉動而產生的反饋脈沖信號,并在LED實時顯示電機的實際轉速。2.1 單片機控制器的硬件設計在此開發了一套運動控制器的軟件系統。該系統的硬件結構是基于單片機而開發的,所用功能為外部中斷、定時中斷、檢測傳感器脈沖信號、及輸入/輸出等。STC89C52RC的P0.0,P0.1,P0.2端口分別作為按鍵SET、按鍵MOVE、按鍵UP的輸入口,通過STC89C52定時器T0的定時中斷控制脈沖發送頻率,進而控制電機的轉速。系統原理圖如圖2所示。
通過按鍵輸入電機所需的轉速值并與轉速傳感器反饋回來的電機轉速相比較,采用PID算法,經單片機處理后,轉化成相應的脈沖信號,再經光電耦合器調節繼電器的開度,通過調節繼電器的脈沖寬度,達到脈寬的調制,從而控制伺服電機上的磁塊正負位移,使電機達到給定的轉速值,同時單片機接受固定在伺服電機轉軸上的轉速傳感器隨著電機轉動而產生的反饋脈沖信號,并在LED實時顯示電機的實際轉速。2.1 單片機控制器的硬件設計在此開發了一套運動控制器的軟件系統。該系統的硬件結構是基于單片機而開發的,所用功能為外部中斷、定時中斷、檢測傳感器脈沖信號、及輸入/輸出等。STC89C52RC的P0.0,P0.1,P0.2端口分別作為按鍵SET、按鍵MOVE、按鍵UP的輸入口,通過STC89C52定時器T0的定時中斷控制脈沖發送頻率,進而控制電機的轉速。系統原理圖如圖2所示。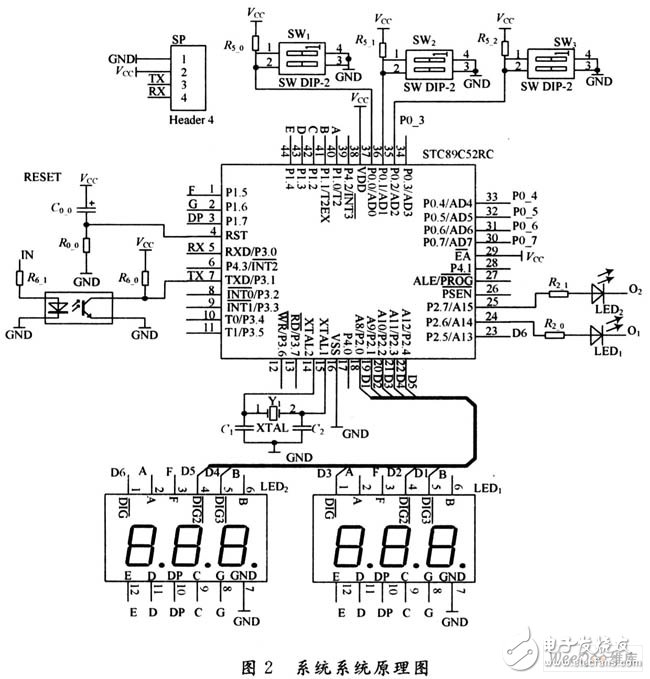 聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
