


矢量控制理論最先是在1971年由德國學者F.Blachke提出的。在伺服系統(tǒng)中,直流伺服電機能獲得優(yōu)良的動態(tài)與靜態(tài)性能,其根本原因是被控制只有電機磁通Ф和電樞電流Ia,且這兩個量是獨立的。此外,電磁轉矩(Tm=KT Ф Ia)與磁通Ф和電樞電流Ia分別成正比關系。因此,控制簡單,性能為線性。如果能夠模擬直流電機,求出交流電機與之對應的磁場與電樞電流,分別而獨立地加以控制,就會使交流電機具有與直流電機近似的優(yōu)良特性。為此,必須將三相交變量(矢量)轉換為與之等效的直流量(標量),建立起交流電機的等效模型,然后按直流電機的控制方法對其進行控制。 下圖所示三相異步交流電機在空間上產生一個角速度為ω0的旋轉磁場Φ。如果用圖b中的兩套空間相差900的繞組α和β來代替,并通以兩相在時間上相差900的交流電流,使其也產生角速度為ω0的旋轉磁場Φ,則可以認為圖a和圖b中的兩套繞組是等效的。若給圖c所示模型上兩個互相垂直繞組d 和 q,分別通以直流電流id 和iq ,則將產生位置固定的磁場Φ,如果再使繞組以角速度ω0旋轉,則所建立的磁場也是旋轉磁場,其幅值和轉速也與圖a一樣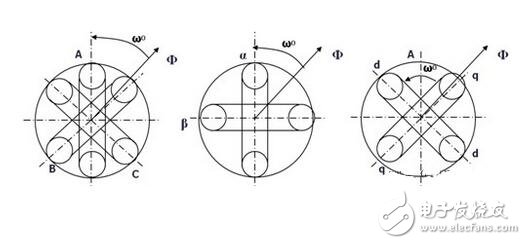 三相A、B、C系統(tǒng)變換到兩相α、β系統(tǒng) 這種變換是將三相交流電機變?yōu)榈刃У亩嘟涣麟姍C。上圖a所示的三相異步電機的定子三相繞組,彼此相差1200空間角度,當通以三相平衡交流電流 iA, iB, iC 時,在定子上產生以同步角速度ω0旋轉的磁場矢量Φ。三相繞組的作用,完全可以用在空間上互相垂直的兩個靜止的α、β繞組代替,并通以兩相在時間上相差900的交流平衡電流 iα 和 iβ ,使其產生的旋轉磁場的幅值和角速度也分別Φ和ω0,則可以認為上圖a、b中的兩套繞組是等效的。 應用三相/二相的數(shù)學變換公式,將其化為二相交流繞組的等效交流磁場。則產生的空間旋轉磁場與三相A、B、C繞組產生的旋轉磁場一致。令三相繞組中的A相繞組的軸線與α坐標軸重合,其磁勢為
三相A、B、C系統(tǒng)變換到兩相α、β系統(tǒng) 這種變換是將三相交流電機變?yōu)榈刃У亩嘟涣麟姍C。上圖a所示的三相異步電機的定子三相繞組,彼此相差1200空間角度,當通以三相平衡交流電流 iA, iB, iC 時,在定子上產生以同步角速度ω0旋轉的磁場矢量Φ。三相繞組的作用,完全可以用在空間上互相垂直的兩個靜止的α、β繞組代替,并通以兩相在時間上相差900的交流平衡電流 iα 和 iβ ,使其產生的旋轉磁場的幅值和角速度也分別Φ和ω0,則可以認為上圖a、b中的兩套繞組是等效的。 應用三相/二相的數(shù)學變換公式,將其化為二相交流繞組的等效交流磁場。則產生的空間旋轉磁場與三相A、B、C繞組產生的旋轉磁場一致。令三相繞組中的A相繞組的軸線與α坐標軸重合,其磁勢為
按照磁勢與電流成正比關系,可求得對應的電流值iα 和 iβ 。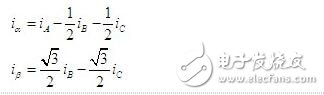
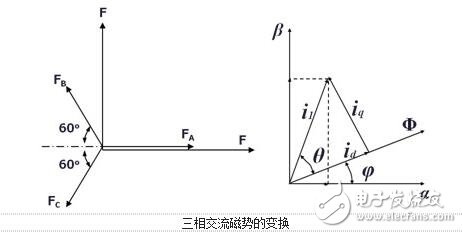 三相交流磁勢的變換 除磁勢的變換外,變換中用到的其它物理量,只要是三相平衡量與二相平衡量,則轉換方式相同。這樣就將三相電機轉換為二相電機。 矢量旋轉變換 將三相電機轉化為二相電機后,還需將二相交流電機變換為等效的直流電機。若設d為激磁繞組,通以激磁電id,q為電樞繞組,通以電樞電流iq ,則產生固定幅度的磁場Φ,在定子上以角速度ω0旋轉。這樣就可看成是直流電機了。將二相交流電機轉化為直流電機的變換,實質就是矢量向標量的轉換,是靜止的直角坐標系向旋轉的直角坐標系之間的轉換。這里,就是把iα 和 iβ 轉化為 id 和 iq ,轉化條件是保證合成磁場不變。iα 和 iβ的合成矢量是 i1,將其在Φ方向及垂直方向投影,即可求得id 和 iq 。 id 和 iq 在空間以角速度ω0旋轉。轉換公式為
三相交流磁勢的變換 除磁勢的變換外,變換中用到的其它物理量,只要是三相平衡量與二相平衡量,則轉換方式相同。這樣就將三相電機轉換為二相電機。 矢量旋轉變換 將三相電機轉化為二相電機后,還需將二相交流電機變換為等效的直流電機。若設d為激磁繞組,通以激磁電id,q為電樞繞組,通以電樞電流iq ,則產生固定幅度的磁場Φ,在定子上以角速度ω0旋轉。這樣就可看成是直流電機了。將二相交流電機轉化為直流電機的變換,實質就是矢量向標量的轉換,是靜止的直角坐標系向旋轉的直角坐標系之間的轉換。這里,就是把iα 和 iβ 轉化為 id 和 iq ,轉化條件是保證合成磁場不變。iα 和 iβ的合成矢量是 i1,將其在Φ方向及垂直方向投影,即可求得id 和 iq 。 id 和 iq 在空間以角速度ω0旋轉。轉換公式為 直角坐標與極坐標的變換 矢量控制中,還要用到直角坐標系與極坐標系的變換。由id和iq求i1,其公式為
直角坐標與極坐標的變換 矢量控制中,還要用到直角坐標系與極坐標系的變換。由id和iq求i1,其公式為 采用矢量變換的感應電機具有和直流電機一樣的控制特點,而且結構簡單、可靠,電機容量不受限制,與同等直流電機相比機械慣量小。 采用矢量變換的感應電機具有和直流電機一樣的控制特點,而且結構簡單、可靠,電機容量不受限制,與同等直流電機相比機械慣量小。聲明:本文為轉載類文章,如涉及版權問題,請及時聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請諒解!
采用矢量變換的感應電機具有和直流電機一樣的控制特點,而且結構簡單、可靠,電機容量不受限制,與同等直流電機相比機械慣量小。 采用矢量變換的感應電機具有和直流電機一樣的控制特點,而且結構簡單、可靠,電機容量不受限制,與同等直流電機相比機械慣量小。聲明:本文為轉載類文章,如涉及版權問題,請及時聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請諒解!
