


全球范圍內(nèi)的安全和安全問題導(dǎo)致安全和監(jiān)控?cái)z像頭的使用大幅增加,通常使用高分辨率CCD或CMOS成像器,這些成像器與基于云的視頻分析相結(jié)合,用于生物識(shí)別和面部識(shí)別分析。然而,為了使生物識(shí)別算法正常工作,攝像機(jī)定位系統(tǒng)必須具有平穩(wěn)的操作,以避免在攝像機(jī)運(yùn)動(dòng)時(shí)出現(xiàn)不必要的圖像失真。許多需要謹(jǐn)慎或遠(yuǎn)程訪問的應(yīng)用也要求系統(tǒng)緊湊和節(jié)能。線性伺服電機(jī)定位系統(tǒng)可以提供所需的平穩(wěn)運(yùn)行,但它們的代價(jià)是更高的功率和需求高分辨率編碼器和精密電路。另外,步進(jìn)電機(jī)具有多種吸引人的視頻監(jiān)控定位功能,包括靜止時(shí)的全扭矩,出色的啟動(dòng),停止和反向響應(yīng)時(shí)間,無誤差累積的運(yùn)動(dòng)重復(fù)性,以及固定步長(zhǎng)的簡(jiǎn)單開環(huán)控制。然而,固定步長(zhǎng)是一個(gè)限制 - 即使200步/旋轉(zhuǎn)電機(jī)的步長(zhǎng)為1.8°,對(duì)于高分辨率視頻來說也不夠平滑。這可以通過微步進(jìn)來克服,新的微步進(jìn)驅(qū)動(dòng)器IC使設(shè)計(jì)人員能夠快速實(shí)現(xiàn)緊湊的高分辨率,低功耗定位系統(tǒng)。步進(jìn)電機(jī)基礎(chǔ)步進(jìn)電機(jī)是無刷直流電機(jī),將完整旋轉(zhuǎn)分成相同數(shù)量的步驟。定子包含固定數(shù)量的纏繞電磁鐵。轉(zhuǎn)子結(jié)構(gòu)有三種類型 - 永磁(PM),可變磁阻(VR)和混合動(dòng)力。永磁電動(dòng)機(jī)具有圍繞轉(zhuǎn)子圓周嵌入的交替的南北永磁體。 VR轉(zhuǎn)子由軟磁材料制成并切入齒(從末端看,轉(zhuǎn)子看起來很像齒輪)。 VR電機(jī)的工作原理是在最小間隙時(shí)發(fā)生最小磁阻,因此轉(zhuǎn)子齒被定向磁極吸引。混合式步進(jìn)電機(jī)有一個(gè)齒形轉(zhuǎn)子,如VR電機(jī),以及一個(gè)軸向軸周圍的磁化同心磁鐵。這種布置提供了類似于VR電動(dòng)機(jī)的步長(zhǎng)(可能的齒數(shù)大于PM轉(zhuǎn)子中可能的磁體數(shù)量),具有改進(jìn)的扭矩特性。定子中的相繞組數(shù)通常為兩個(gè),但也可提供三相和五相電機(jī)。電機(jī)可以兩種方式纏繞 - 單極或雙極。圖1和圖2顯示了兩相電機(jī)中的兩個(gè)選項(xiàng)。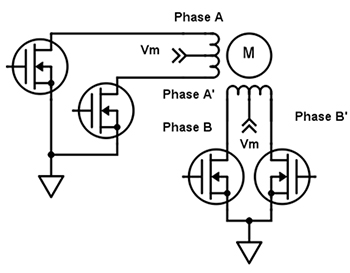 圖1:在兩相單極繞組中,中心抽頭連接到電機(jī)電壓,相腳切換到接地以改變電流方向。 (使用Digi-Key Scheme-It繪制的圖表)單極繞組每相具有一個(gè)繞組,帶有中心抽頭。中心抽頭通常連接到電動(dòng)機(jī)電壓源,每個(gè)繞組的兩端交替接地,以反轉(zhuǎn)該繞組提供的磁場(chǎng)方向。這使電機(jī)控制簡(jiǎn)單,但電機(jī)效率較低,因?yàn)橐淮沃皇褂靡话肜@組。
圖1:在兩相單極繞組中,中心抽頭連接到電機(jī)電壓,相腳切換到接地以改變電流方向。 (使用Digi-Key Scheme-It繪制的圖表)單極繞組每相具有一個(gè)繞組,帶有中心抽頭。中心抽頭通常連接到電動(dòng)機(jī)電壓源,每個(gè)繞組的兩端交替接地,以反轉(zhuǎn)該繞組提供的磁場(chǎng)方向。這使電機(jī)控制簡(jiǎn)單,但電機(jī)效率較低,因?yàn)橐淮沃皇褂靡话肜@組。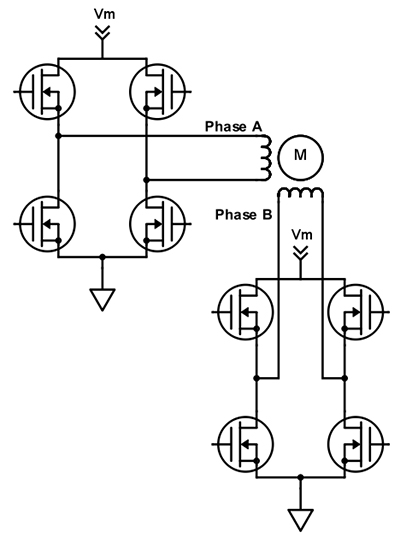 圖2 :在雙相雙極繞組中,使用H橋驅(qū)動(dòng)器反轉(zhuǎn)相電流,允許總繞組立即通電。 (使用Digi-Key Scheme-It繪制的圖表)雙極布置使用所有相繞組,但切換驅(qū)動(dòng)電流更復(fù)雜。通常,這是通過H橋驅(qū)動(dòng)器完成的,它也可以控制繞組中的電流(電機(jī)轉(zhuǎn)矩與電流成正比。)監(jiān)控?cái)z像機(jī)中使用的步進(jìn)電機(jī)通常是兩相混合型或PM雙極型。在兩相電動(dòng)機(jī)中,定子中的電磁鐵對(duì)略微偏移,使得當(dāng)一個(gè)繞組斷電并且下一個(gè)繞組接通時(shí),齒將被吸引到下一個(gè)位置。這允許步數(shù)為轉(zhuǎn)子齒數(shù)的四倍。因此,50齒轉(zhuǎn)子每轉(zhuǎn)200步,或每步1.8°。步進(jìn)排序雙極步進(jìn)電機(jī)有兩個(gè)繞組。通過順序改變繞組中的電流來移動(dòng)轉(zhuǎn)子。可視化的一種便捷方法是使用相圖。聲明:本文為轉(zhuǎn)載類文章,如涉及版權(quán)問題,請(qǐng)及時(shí)聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請(qǐng)諒解!
圖2 :在雙相雙極繞組中,使用H橋驅(qū)動(dòng)器反轉(zhuǎn)相電流,允許總繞組立即通電。 (使用Digi-Key Scheme-It繪制的圖表)雙極布置使用所有相繞組,但切換驅(qū)動(dòng)電流更復(fù)雜。通常,這是通過H橋驅(qū)動(dòng)器完成的,它也可以控制繞組中的電流(電機(jī)轉(zhuǎn)矩與電流成正比。)監(jiān)控?cái)z像機(jī)中使用的步進(jìn)電機(jī)通常是兩相混合型或PM雙極型。在兩相電動(dòng)機(jī)中,定子中的電磁鐵對(duì)略微偏移,使得當(dāng)一個(gè)繞組斷電并且下一個(gè)繞組接通時(shí),齒將被吸引到下一個(gè)位置。這允許步數(shù)為轉(zhuǎn)子齒數(shù)的四倍。因此,50齒轉(zhuǎn)子每轉(zhuǎn)200步,或每步1.8°。步進(jìn)排序雙極步進(jìn)電機(jī)有兩個(gè)繞組。通過順序改變繞組中的電流來移動(dòng)轉(zhuǎn)子。可視化的一種便捷方法是使用相圖。聲明:本文為轉(zhuǎn)載類文章,如涉及版權(quán)問題,請(qǐng)及時(shí)聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請(qǐng)諒解!
您好,歡迎進(jìn)入博爾慧變頻器的官方網(wǎng)站 | 微信公眾平臺(tái)
