


研磨機(jī)伺服系統(tǒng)的軟件設(shè)計(jì)包括E內(nèi)部對(duì)象(目標(biāo)位置、速度、加速度、減速度、找原點(diǎn)方式以及工作模式等)賦值和PLC編程控制。伺服放大器專(zhuān)用編程軟件,采用順序編程(Sequencer Programming)的方法對(duì)放大器內(nèi)部的對(duì)象賦值。由于研磨過(guò)程多次涉及到定位,因而工作模式選用位置控制模式(絕對(duì)/相對(duì)位置模式),該模式下要定義的對(duì)象如表l所示。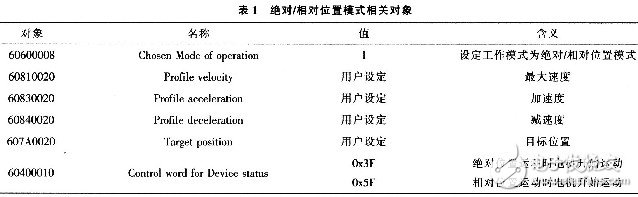 伺服驅(qū)動(dòng)器每段程序都有一個(gè)相應(yīng)的程序段號(hào),在其列表內(nèi)最多包含8個(gè)具有讀寫(xiě)(RW)屬性的對(duì)象。調(diào)用一段程序后,該程序段內(nèi)的所有指令會(huì)按照從上至下的順序依次執(zhí)行,這就是順序編程思想。
伺服驅(qū)動(dòng)器每段程序都有一個(gè)相應(yīng)的程序段號(hào),在其列表內(nèi)最多包含8個(gè)具有讀寫(xiě)(RW)屬性的對(duì)象。調(diào)用一段程序后,該程序段內(nèi)的所有指令會(huì)按照從上至下的順序依次執(zhí)行,這就是順序編程思想。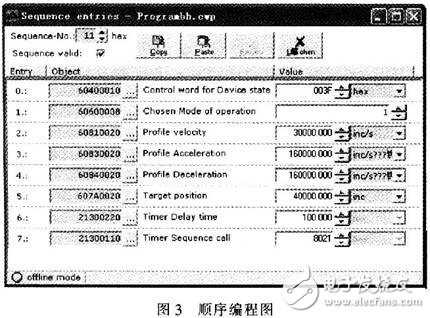 圖 3是Y軸伺服放大器控制伺服電機(jī)帶動(dòng)操作臺(tái)進(jìn)入入料點(diǎn)的參數(shù)設(shè)定窗口。程序段號(hào)為11,工作模式選擇位置模式中的絕對(duì)位置運(yùn)動(dòng)方式(設(shè)備狀態(tài)字 60400010設(shè)定為0X003F),最大速度、加速度、減速以及目標(biāo)位置值分別設(shè)定為30 000、160 000、16 000和40 000。 伺服提供的觸發(fā)程序段的控制事件有輸入端口的邊沿信號(hào)觸發(fā)、內(nèi)部編程設(shè)定的定時(shí)器時(shí)間到、兩個(gè)數(shù)值的比較結(jié)果為真、目標(biāo)位置到達(dá)等,一些事件可以重復(fù)定義,所以一段程序可以執(zhí)行一次也可以執(zhí)行多次。同時(shí),在一個(gè)程序段內(nèi)又可以調(diào)用另外一個(gè)程序段。 在軟件的數(shù)字輸入窗口可以設(shè)定ED200數(shù)字輸入端口DINl~DIN8的邊沿信號(hào)所對(duì)應(yīng)的程序段,實(shí)現(xiàn)從輸入口調(diào)用內(nèi)部程序段的功能。設(shè)計(jì)中數(shù)字輸入端口的信號(hào)由PLC提供,這樣就可以通過(guò)PIC間接對(duì)伺服電機(jī)進(jìn)行控制。
圖 3是Y軸伺服放大器控制伺服電機(jī)帶動(dòng)操作臺(tái)進(jìn)入入料點(diǎn)的參數(shù)設(shè)定窗口。程序段號(hào)為11,工作模式選擇位置模式中的絕對(duì)位置運(yùn)動(dòng)方式(設(shè)備狀態(tài)字 60400010設(shè)定為0X003F),最大速度、加速度、減速以及目標(biāo)位置值分別設(shè)定為30 000、160 000、16 000和40 000。 伺服提供的觸發(fā)程序段的控制事件有輸入端口的邊沿信號(hào)觸發(fā)、內(nèi)部編程設(shè)定的定時(shí)器時(shí)間到、兩個(gè)數(shù)值的比較結(jié)果為真、目標(biāo)位置到達(dá)等,一些事件可以重復(fù)定義,所以一段程序可以執(zhí)行一次也可以執(zhí)行多次。同時(shí),在一個(gè)程序段內(nèi)又可以調(diào)用另外一個(gè)程序段。 在軟件的數(shù)字輸入窗口可以設(shè)定ED200數(shù)字輸入端口DINl~DIN8的邊沿信號(hào)所對(duì)應(yīng)的程序段,實(shí)現(xiàn)從輸入口調(diào)用內(nèi)部程序段的功能。設(shè)計(jì)中數(shù)字輸入端口的信號(hào)由PLC提供,這樣就可以通過(guò)PIC間接對(duì)伺服電機(jī)進(jìn)行控制。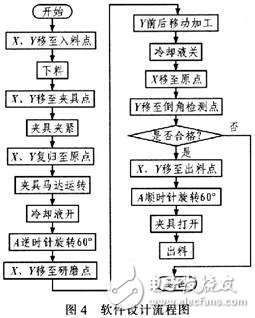 光纖連接器插針體研磨的一個(gè)完整的單周期工序包括入料、研磨、出料以及伺服定位等操作,圖4為系統(tǒng)的軟件流程圖。其中,定位部分主要由ED200伺服放大器內(nèi)部順序編程控制,并且通過(guò)PLC信號(hào)觸發(fā)程序段。研磨機(jī)整機(jī)系統(tǒng)由PLC編程控制,PLC采用梯形圖編程方法。 支持兩線(半雙工)和4線(全雙工)的RS485通訊。PLC的通訊擴(kuò)展模塊FX2N-485-BD與進(jìn)行RS485通訊,可以實(shí)現(xiàn)兩者間的數(shù)據(jù)交換。PLC程序采用梯形圖編寫(xiě),傳輸數(shù)據(jù)的地址及字節(jié)數(shù)用RS串行通訊指令設(shè)定。接入觸摸屏后,通過(guò)觸摸屏的數(shù)據(jù)輸入窗口可以修改內(nèi)部程序段的目標(biāo)位置值聲明:本文為轉(zhuǎn)載類(lèi)文章,如涉及版權(quán)問(wèn)題,請(qǐng)及時(shí)聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請(qǐng)諒解!
光纖連接器插針體研磨的一個(gè)完整的單周期工序包括入料、研磨、出料以及伺服定位等操作,圖4為系統(tǒng)的軟件流程圖。其中,定位部分主要由ED200伺服放大器內(nèi)部順序編程控制,并且通過(guò)PLC信號(hào)觸發(fā)程序段。研磨機(jī)整機(jī)系統(tǒng)由PLC編程控制,PLC采用梯形圖編程方法。 支持兩線(半雙工)和4線(全雙工)的RS485通訊。PLC的通訊擴(kuò)展模塊FX2N-485-BD與進(jìn)行RS485通訊,可以實(shí)現(xiàn)兩者間的數(shù)據(jù)交換。PLC程序采用梯形圖編寫(xiě),傳輸數(shù)據(jù)的地址及字節(jié)數(shù)用RS串行通訊指令設(shè)定。接入觸摸屏后,通過(guò)觸摸屏的數(shù)據(jù)輸入窗口可以修改內(nèi)部程序段的目標(biāo)位置值聲明:本文為轉(zhuǎn)載類(lèi)文章,如涉及版權(quán)問(wèn)題,請(qǐng)及時(shí)聯(lián)系我們刪除(QQ: 229085487),不便之處,敬請(qǐng)諒解!
您好,歡迎進(jìn)入博爾慧變頻器的官方網(wǎng)站 | 微信公眾平臺(tái)
