


當前位置:首頁 > 新聞中心
三菱FX3U定位控制和伺服應用技術的詳細介紹和原點回歸指令說明
發布者:admin 發布時間:2020/12/2 8:10:40 點擊:336
指令一、PLC定位及伺服控制系統介紹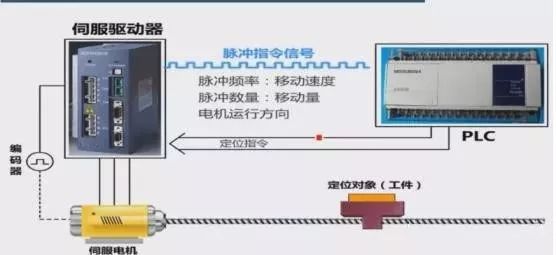 通過PLC給伺服驅動器發驅動脈沖,通過改變脈沖頻率來控制移動速度,通過改變脈沖數量來改變移動量,控制步進電機移動方向。伺服驅動器是執行機構,在接收到PLC發來的信號,控制電機來運動,通過位置編碼器精準定位。1、定位控制基本單元
通過PLC給伺服驅動器發驅動脈沖,通過改變脈沖頻率來控制移動速度,通過改變脈沖數量來改變移動量,控制步進電機移動方向。伺服驅動器是執行機構,在接收到PLC發來的信號,控制電機來運動,通過位置編碼器精準定位。1、定位控制基本單元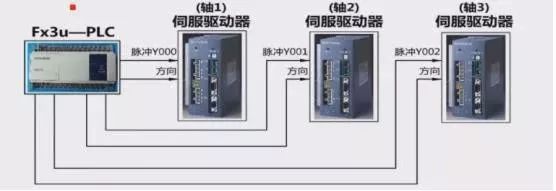 通過一個FX3U的CPU就可以帶三個軸的伺服驅動器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。2、FX3U PLC特殊適配器擴展單元
通過一個FX3U的CPU就可以帶三個軸的伺服驅動器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。2、FX3U PLC特殊適配器擴展單元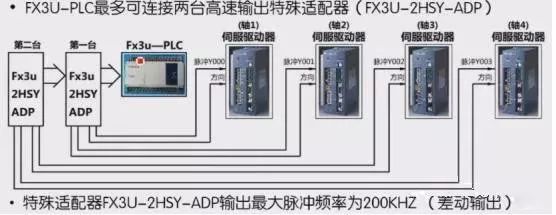 基本單元的脈沖輸出Y不起作用,只能用特殊適配器擴展單元的輸入Y來輸出脈沖。3、PLC輸入端內部電路(漏型輸入)
基本單元的脈沖輸出Y不起作用,只能用特殊適配器擴展單元的輸入Y來輸出脈沖。3、PLC輸入端內部電路(漏型輸入)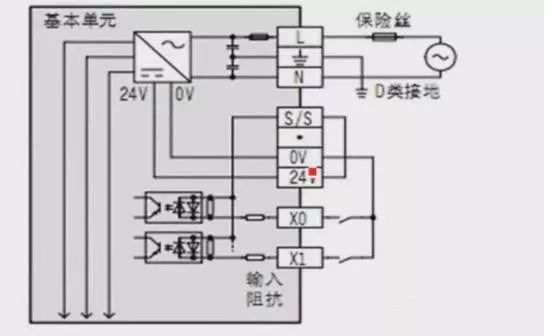 4、PLC輸出端內部電路
4、PLC輸出端內部電路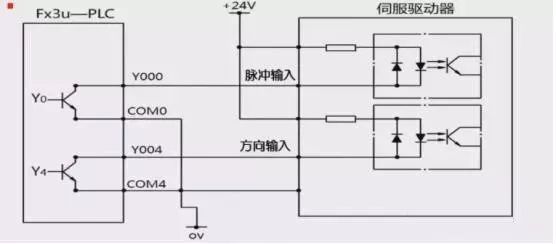 Y0可以提供脈沖頻率和脈沖數量。利用Y4輸出方向。由定位指令來實現,不需要單獨編程Y4.二、FX3U-PLC定位控制指令(一)、原點回歸指令:ZRN
Y0可以提供脈沖頻率和脈沖數量。利用Y4輸出方向。由定位指令來實現,不需要單獨編程Y4.二、FX3U-PLC定位控制指令(一)、原點回歸指令:ZRN 首先以S1的速度快速運動,當到近點S3后切換到爬行速度S2,D為輸出。只能在原點的正方向才能使用原點回歸指令,在反向是不能使用ZRN指令的。聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
首先以S1的速度快速運動,當到近點S3后切換到爬行速度S2,D為輸出。只能在原點的正方向才能使用原點回歸指令,在反向是不能使用ZRN指令的。聲明:本文為轉載類文章,如涉及版權問題,請及時聯系我們刪除(QQ: 229085487),不便之處,敬請諒解!
